Author: |
With the increase of large optical telescope diameter, the detection ability and imaging resolution are improving continually and the requirement of tracking accuracy is increasingly high. In order to meet the needs of low speed and steady tracking of the large diameter telescope, the permanent magnet synchronous motor, which has attractive characteristics in terms of efficiency, power density, torque-to-inertia ratio, reliability, etc, is employed in the servo drive unit. However, inherent torque ripples in the PMSM are encountered in many industrial applications. These torque ripples induce periodic oscillations in the motor speed and usually lead to a degradation of the servo system performance. Therefore, research on the detection and suppression of torque ripples on the permanent magnet synchronous motor, has great significance to improve the tracking accuracy of the servo control system of large diameter telescope.
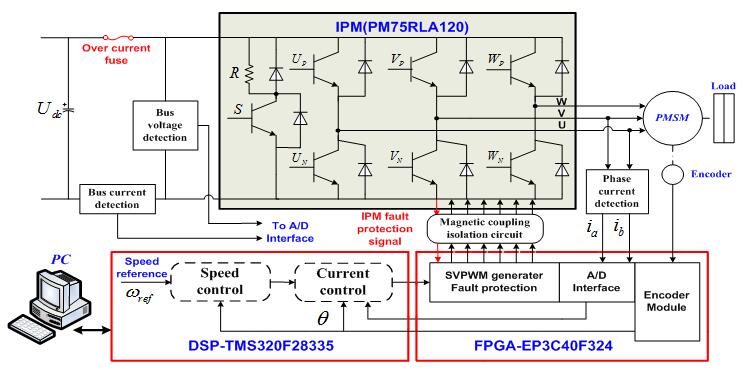
In the context of the demand traction and support of 4 meter optical telescope project, the robust iterative learning control method which synthesizes iterative learning control and adaptive sliding mode control technique, is proposed by the precision tracking control team in the Department of Optical-Electronic Detection, Changchun Institute of Optics, Fine Mechanic, and Physics.
Compared to the traditional method, the torque ripple in the speed can be reduced by 33%, and the influence of torque ripple on servo control performance is effectively suppressed. Iterative learning control is used to inhibit the periodic disturbance, i.e., periodic torque ripples. Meanwhile, the adaptive sliding mode control acts as the robust part, and it deals with the system parameter variations and external disturbances. The robust iterative learning control method can effectively suppress the torque ripples and improve the dynamic and robust performance of the speed control system simultaneously.
The proposed method provides technical foundation for the low speed and high precision control of permanent magnet synchronous motor in 4 meter telescope. The research results were published in the recent IEEE Transactions on Power Electronics (DOI:10.1109/TPEL.2017.2711098, IF:7.151).
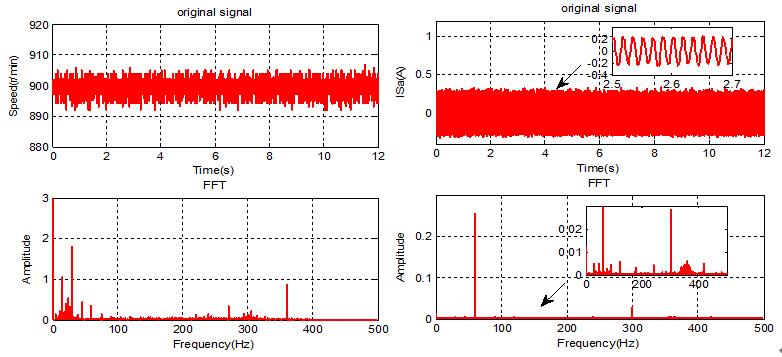
Experimental results of robust iterative learning control: (a) Speed response of the motor;(b)Phase current response of the motor(Group by CIOMP)
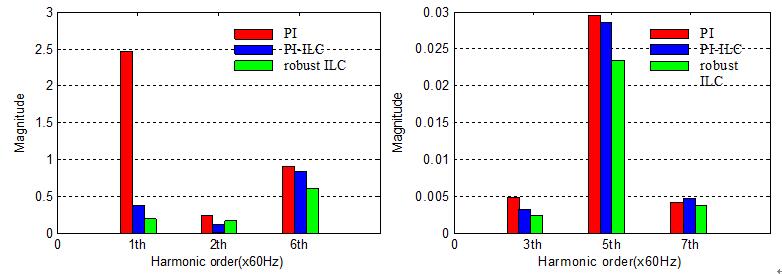
Spectrum analysis of robust iterative learning control: (a) Comparison results of the harmonic amplitudes in speed; (b) Comparison results of the harmonic amplitudes in phase current(Group by CIOMP)

 中文
中文